Robust Slip Detection using Magnetic Tactile Sensors during Dynamic Robotic Manipulation via Stray Magnetic Fields Compensation
IEEE Sensors Journal, (Early Access)
DOI: 10.1109/JSEN.2025.3598269
[Paper] [Video]
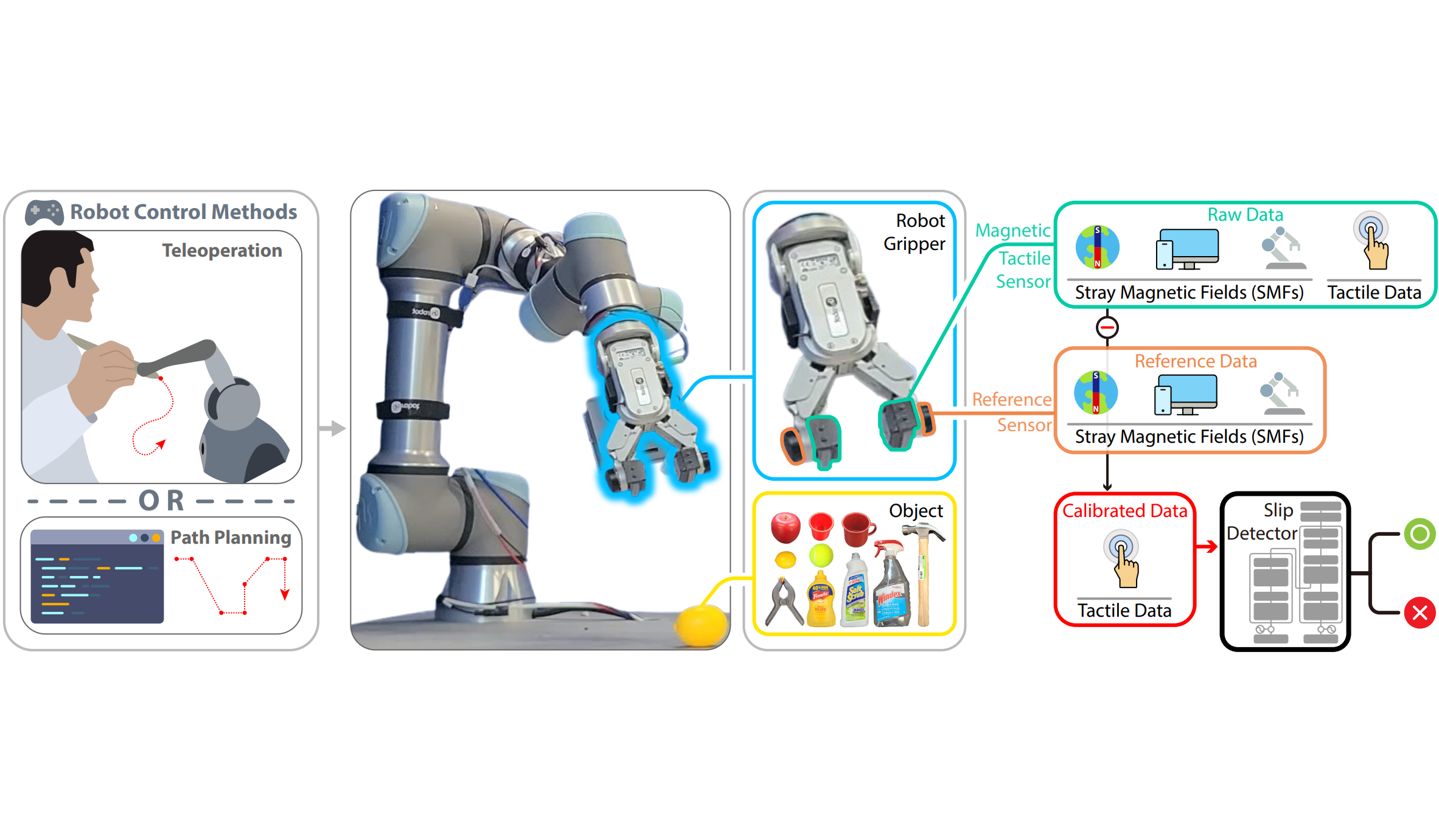
Stable object grasping is essential in robot manipulation, but unexpected slippage is a major cause of task failure. Magnetic tactile sensors are promising for slip detection due to their high sensitivity, but their susceptibility to Stray Magnetic Fields (SMFs) has limited their application in practical robotic environments. In this paper, a novel slip detection framework is proposed to address this issue by utilizing a reference magnetic sensor to measure and compensate for SMFs in real time. The proposed system integrates a custom-developed magnetic tactile sensor array with the reference sensor, effectively eliminating the influence of SMFs generated by dynamic robot movements and changes in the surrounding environment. This allows for the extraction of pure tactile information, improving the accuracy and robustness of slip detection. Furthermore, a Transformer-based time series analysis model is employed to effectively learn and classify subtle slip signals. In this study, experiments were conducted on YCB objects with various shapes and weights under two control modes, teleoperation and path planning, demonstrating that the proposed system effectively detects various types of slip, including rotational slip caused by gravity and slip caused by external forces. Experimental results show that the proposed SMFs compensation technique significantly improves the F1-slip detection result even in dynamic environments with substantial SMFs interference and exhibits high generalization performance to unseen objects. This work is significant because it establishes a practical foundation for robust slip detection in complex and dynamic real-world robotic applications, ensuring the reliability of magnetic tactile sensors through SMFs compensation.